Using AS5600 with RPi Pico

少し前に入手したAS5600を試す。
このセンサは、磁気回転位置を読み取るモノで、DJがレコードをキュッキュと回してる動作を実装できないかと、購入したみた。
Amazon.co.jp: Ahvqevn 4個 AS5600磁気エンコーダ磁気誘導角度測定センサーモジュール12ビット…
https://www.amazon.co.jp/dp/B0CQZV489Z
Aliexpressだと、送料込みで1個350円くらい。
部材
- AS5600
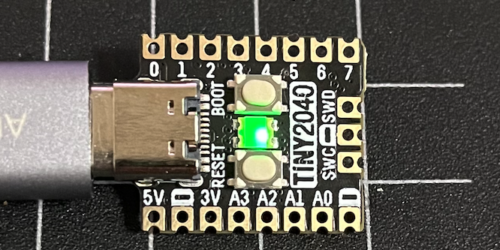
- RPi pico(互換品)
- 3Dプリントしたクロージャー
- XHコネクタとケーブル
- SSD1306
- ミニチュアベアリング 内径8mm×外径22mm×幅7mm
クロージャー
磁気なので、センサの上にクルクル回転できる磁石が必要。そのための部品は、3Dプリンタで作成。
モデルデータは、thingiverse から取得。
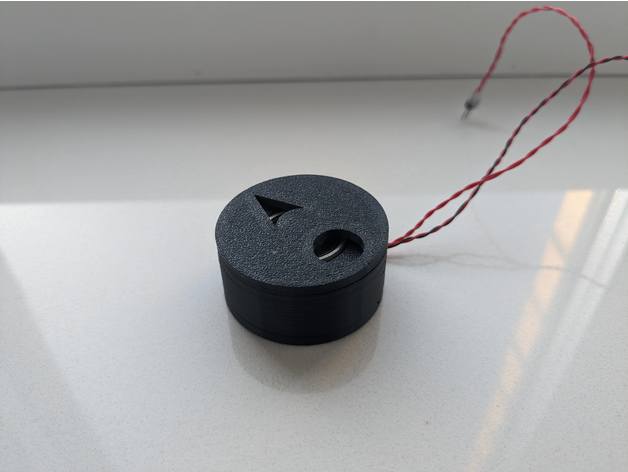
ただし、センサの裏側にXH端子を出すために、底部は底上げした。
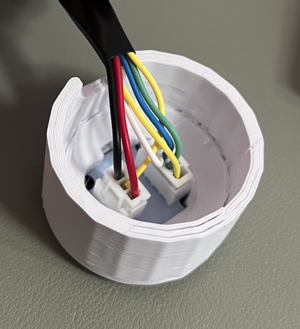
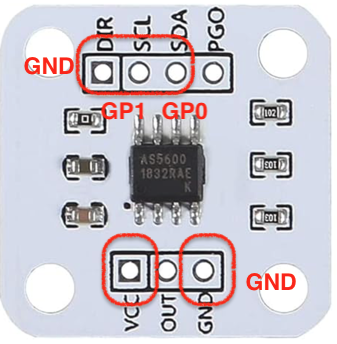
配線
AS5600 の裏側からXH端子の3PINと4PINを半田付け
0から360度の回転位置のを、PWM OUT と I2Cの2つの方法で取得できるけど、素直にI2Cにする。
- SCL .. GP1
- SDA ... GP0
program
circuitpython 9.0.4